
Produk

kotak kadbod gantri auto palletizer
Penerangan ringkas:
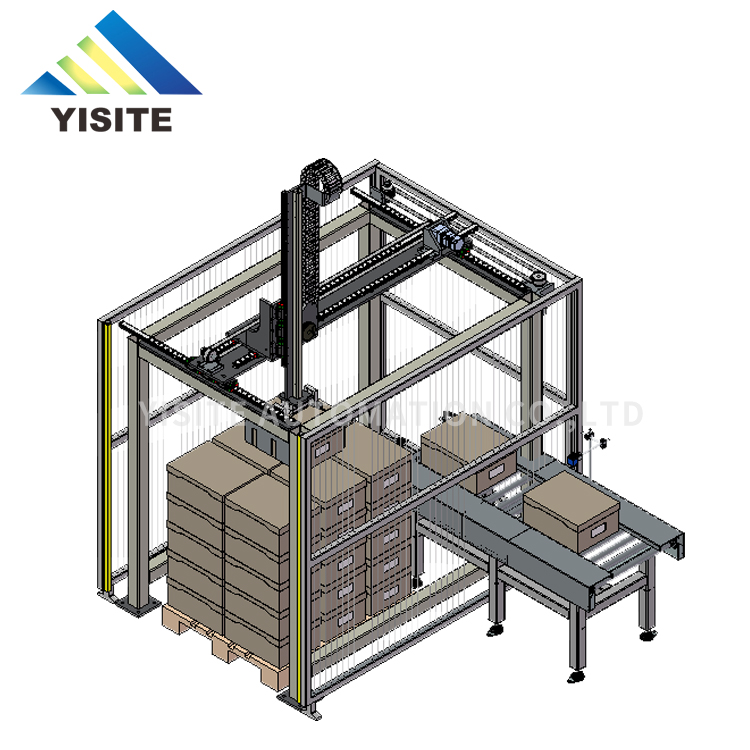
kotak karton gantri auto palletizer pengenalan produk: Unit utama palletizer terdiri daripada troli yang boleh bergerak ke hadapan dan ke belakang, bingkai dan platform pembawa yang boleh diangkat ke atas dan ke bawah. Saiz dan lekapan boleh disesuaikan.
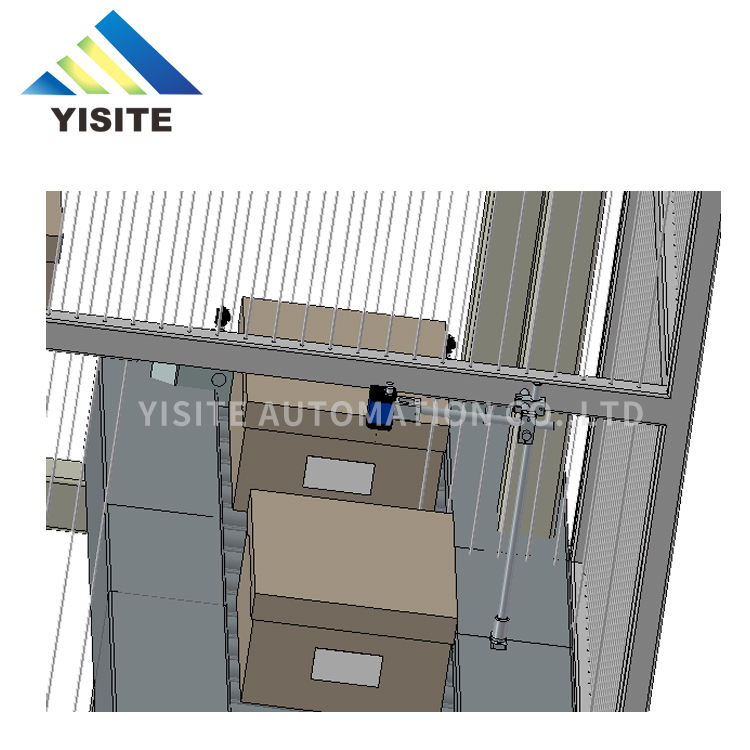
kotak karton gantri auto palletizer adalah dengan reka bentuk khas cengkaman pneumatik, tekanan boleh laras, dilengkapi dengan injap penimbal tekanan, supaya tindakan genggaman dilengkapi dengan mekanisme aruhan, secara automatik dapat melihat objek, dan memaklumkan pusat kawalan untuk genggaman objek.

tentang kita

Kami adalah pengeluar peralatan automasi tersuai profesional. Produk kami termasuk depalletizer, mesin pembungkusan pilih dan letak, palletizer, aplikasi penyepaduan robot, manipulator pemunggahan dan pemunggahan, pembentukan karton, pengedap karton, dispensper palet, mesin pembungkus dan penyelesaian automasi lain untuk barisan pengeluaran pembungkusan bahagian belakang.
Keluasan kilang kami adalah kira-kira 3,500 meter persegi. Pasukan teknikal teras mempunyai purata pengalaman 5-10 tahun dalam automasi mekanikal, termasuk 2 jurutera reka bentuk mekanikal. 1 jurutera pengaturcaraan, 8 pekerja pemasangan, 4 orang penyahpepijatan selepas jualan, dan 10 pekerja lain
Prinsip kami ialah "pelanggan didahulukan, kualiti diutamakan, reputasi diutamakan", kami sentiasa membantu pelanggan kami "meningkatkan kapasiti pengeluaran, mengurangkan kos, dan meningkatkan kualiti" kami berusaha untuk menjadi pembekal utama dalam industri automasi jentera.
Kekuda XYZ manipulator susun bos kadbod automatik sepenuhnya
1. Komposisi mesin penyusun
Mesin palletizing terdiri daripada bingkai pemasangan, sistem penentududukan, sistem pemacu servo, sistem kawalan, sistem kawalan dan pengedaran elektrik, peranti perlindungan keselamatan, dsb., dilengkapi dengan sistem penentududukan suapan automatik. (Sistem bekalan tindanan automatik pilihan)
2. Rak pemasangan mesin susun
Oleh kerana kelajuan pergerakan penumpuk adalah sangat pantas, keadaan permulaan mempunyai kesan yang besar pada bingkai pelekap. Bingkai pemasangan mestilah tegar yang sangat baik untuk memastikan operasi susun yang stabil, jadi kami telah mereka bentuk struktur rangka keluli yang dikimpal sebagai bingkai sokongan.
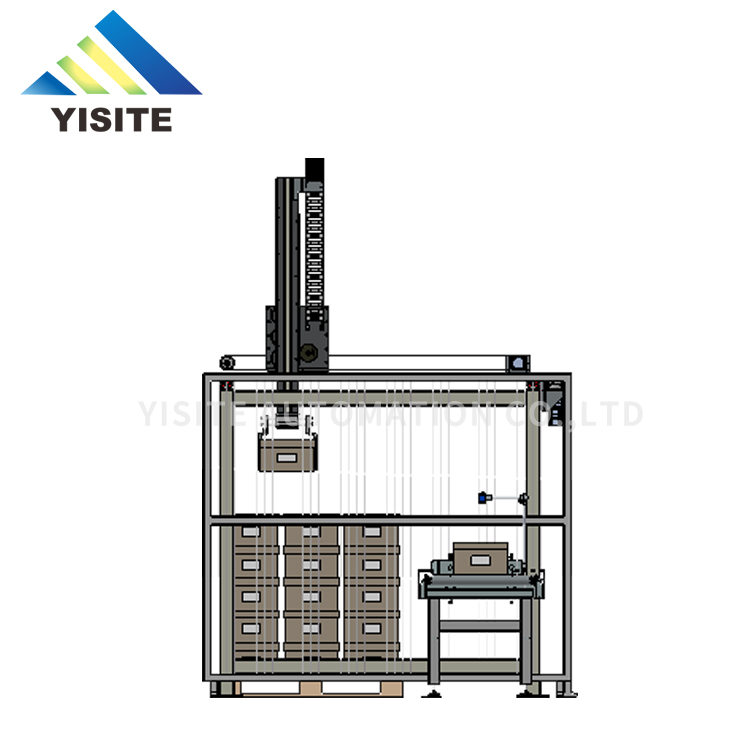
3. Sistem penentududukan mesin palletizer penumpuk
Sistem penentududukan penumpuk adalah teras kepada keseluruhan peralatan, adalah produk Syarikat Yaskawa (Jepun), kelajuan gerakan pantas, dan ketepatan pengulangan adalah tinggi, X, Y, Z tiga koordinat dipilih untuk penghantaran tali pinggang gigi segerak, koordinat tunggal ketepatan kedudukan ulangan ialah 0.1mm, kelajuan gerakan talian pantas: 1000 mm/s. Paksi X ialah sistem kedudukan tunggal dengan panjang tunggal 3000mm dan rentang 1935mm. Pemancar segerak memastikan pergerakan segerak kedua-dua sistem penentududukan dan didorong oleh motor servo 1500W. Untuk memadankan tork dan inersia pemanduan, terdapat pengurang gear planet berketepatan tinggi.
Paksi Y menggunakan sistem kedudukan dwi. Sebab mengapa unit penentududukan dengan keratan rentas yang begitu besar adalah terutamanya kerana paksi Y ialah sokongan dua hujung dengan struktur penggantungan tengah. Jika keratan rentas yang dipilih tidak mencukupi, kestabilan pergerakan robot tidak akan terjamin, dan robot akan menggeletar apabila bergerak pada kelajuan tinggi.Dua unit penentududukan digunakan bersebelahan untuk memotong paksi-Z di tengah dan keseimbangan beban dengan baik. Mod pemasangan ini mempunyai kestabilan yang sangat baik. Kedua-dua sistem kedudukan didorong oleh motor servo 1500W, dilengkapi dengan pengurang gear planet berketepatan tinggi untuk memadankan tork pemacu dan inersia.
Sistem penentududukan paksi Z adalah teguh dan stabil.Produk ini secara amnya mempunyai peluncur tetap dan pergerakan naik dan turun keseluruhan.Motor servo perlu memperbaiki objek dengan cepat, yang perlu mengatasi daya graviti dan pecutan yang hebat, dan memerlukan kuasa yang lebih besar .Dalam amalan, kami memilih motor servo 2000W, dilengkapi dengan pengurang gear planet berketepatan tinggi. Paksi A ialah paksi putaran.
4. Sistem pemacu servo
Mesin manipulator susun menggunakan motor servo dengan fungsi digital. Setiap aci motor dilengkapi dengan motor servo dan pengurang, empat motor servo dan empat pengurang, termasuk motor menegak dengan motor servo kunci.
5. Cengkaman penumpuk
Susun dengan reka bentuk khas cengkaman pneumatik, tekanan boleh laras, dilengkapi dengan injap penimbal tekanan, supaya tindakan genggam dilengkapi dengan mekanisme aruhan, secara automatik dapat melihat objek, dan memaklumkan pusat kawalan untuk genggaman objek.
6, sistem kawalan
Sistem kawalan terdiri daripada PLC besar dan skrin sentuh. Sistem ini mempunyai keupayaan pengaturcaraan yang berkuasa. Dengan model palet yang berbeza, sistem boleh pratetap pelbagai program artifak, dan untuk menggantikan program yang sepadan boleh dikendalikan pada skrin sentuh.
7, peranti keselamatan
Mesin ini mempunyai fungsi gesaan dan penggera kesalahan, dan setiap kesalahan dapat mencerminkan lokasi tertentu dengan tepat, mudah dan cepat untuk menghapuskan kesalahan, terutamanya termasuk: fungsi perlindungan perlanggaran robot; pemasangan bahan kerja dalam pengesanan tempat; perlindungan keselamatan skrin cahaya.
Parameter teknikal
1. Model mesin: YST-MD1500
2. Kapasiti menyusun: 200-500 kotak / H
3. Rangka : SS41 (rawatan plastik suntikan keluli A3) aci galas S45C keluli
4. Kuasa: AC, 3 fasa, 380V, 9KW 50HZ
5. Penggunaan udara: 500NL / MIN (penggunaan udara: 5-6kg / cm2)
6. Dimensi peralatan: (L) 3500mm (W) 2250mm (H) 2800mm (bergantung pada reka bentuk susun atur sebenar)
7. Berat peralatan: 1,500 kg


Konfigurasi kelebihan utama
1. Motor servo jenama Yaskawa
2. Pengurangan kelajuan jenama Taiwan
3. Mitsubishi (Jepun) PLC
4. Penyentuh dan suis hendaklah digunakan dalam Schneider
5. Penderia fotoelektrik Omron
6. Tindakan paparan kawalan antara muka dan status penggera dan fungsi penggera
7. Penukar frekuensi jenama Yaskawa
8. Bingkai dan panel sisi dibuat oleh keluli karbon
9. Unsur pneumatik AirTac Taiwan
10. Sucker jenama PIAB Itali









